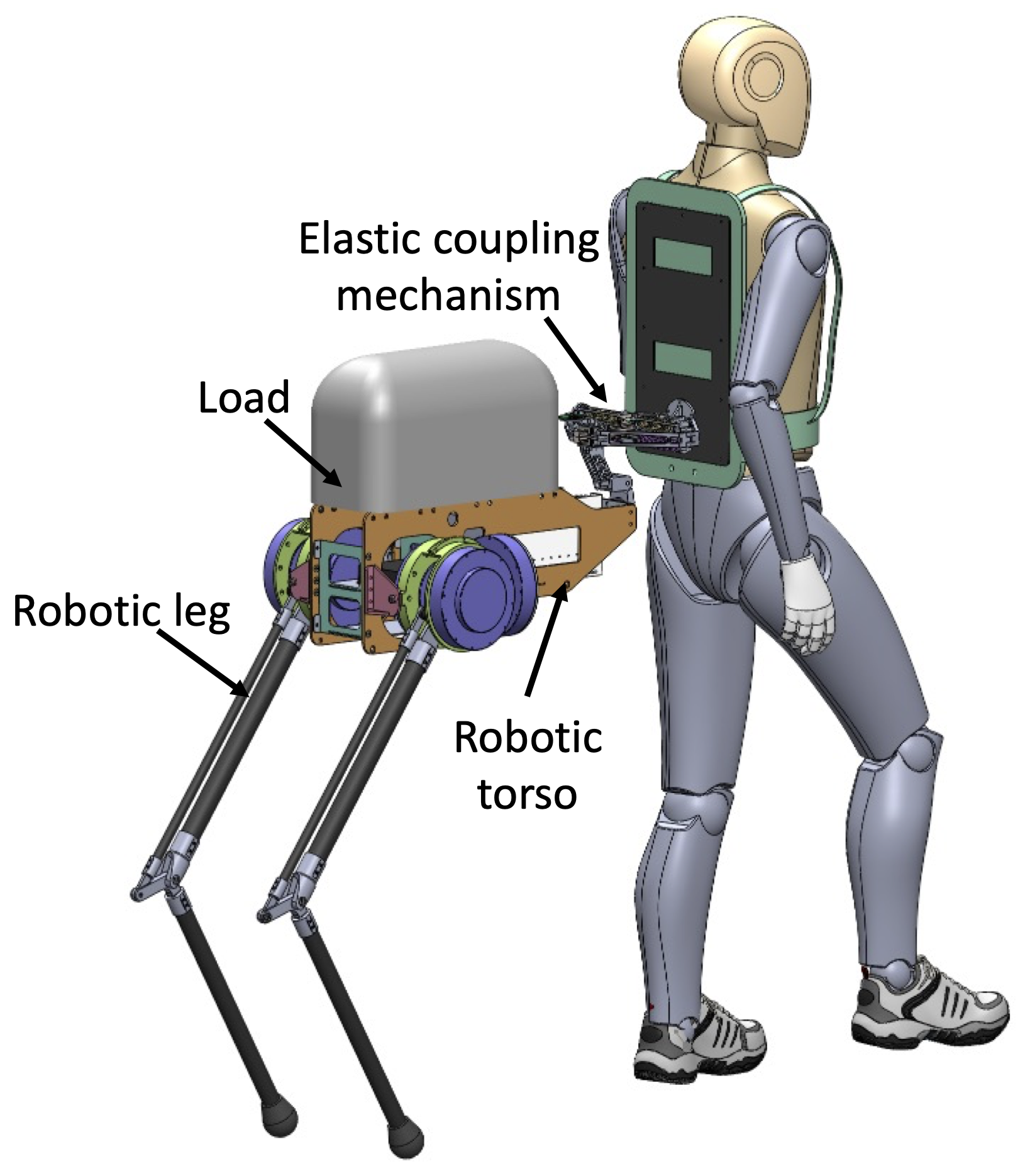
南方科技大学のフー・チェンロン教授のチームは当初、着用可能な体重支持歩行ロボット「ケンタウロス」を開発した。関連する結果は、ロボット工学分野の権威ある雑誌に掲載されています。従来の外骨格ロボットはアシスト効率が低く、人間の代謝率は約 10% しか低下しません。ケンタウロス ロボットは従来のデザインを打ち破り、耐荷重に優れた四足動物の形状からインスピレーションを得ています。独立した手足として、ウェアラブルな弾性結合インターフェイスを介して人間の背中に接続され、人間と機械のハイブリッド四足システムを構築します。
ロボットには、非線形の剛性特性を備えた軟化弾性カップリング機構が装備されており、パワーアシストとバランスの動的分離を実現します。歩行インタラクション協調制御フレームワークと組み合わせると、人体の運動意図をリアルタイムに感知し、手動指示なしで全方向に高精度に追従し、同時に安定した水平推力を出力します。
実験による検証により、このロボットは優れた性能を持っていることがわかりました。機動性では、1メートルの狭い空間で杭の周囲を「8の字」で一周し、段差や坂道などの複雑な路面もスムーズに通過できる。
耐荷重性能に関しては、20kgの重りを運ぶと、人体の正味代謝コストが35%減少し、足裏にかかる圧力が52%減少します。、安定性と無負荷歩行の間に大きな違いはありません。
このロボットは、緊急救助、現場探索、複雑な地形の物流支援などのシナリオに適しており、将来的には人体の生理学的限界を突破することが期待されています。