ドイツのヴュルツブルク大学の研究チームは最近、人間の髪の毛の直径の約50分の1の光子駆動ナノロボットを開発した。液体の顕微鏡環境で細菌を正確に追跡、捕捉、輸送、放出することができ、人間が微生物の世界を直接制御するための新しい技術的道を提供します。
報告書によると、このタイプのマイクロロボットは、従来の手段では効果的に介入することがほとんど不可能なマイクロスケールの作業を目的としています。液体環境中の単細胞や細菌などの生物材料は、科学研究においていかに高精度に制御するかが常に大きな課題であったが、今回の成果は細菌の収集や移動などが可能になったことを示している。
研究チームは、ドイツのユリウス・マクシミリアン大学ヴュルツブルク教授のベルト・ヘヒト氏が率いた。研究チームが提案する核となる解決策は、単一の光子が放出されたときに生成される弱い反動を利用して、「マイクロドローン」と呼ばれるミクロンスケールのデバイスの動きを駆動することだ。
報告によると、最大 4 つのプラズモニック ナノアンテナをこれらのデバイス内に統合できるとのことです。それらは最初に特定の特性を持つ光を吸収し、次に指向性のある方法で光子を再放出します。各ショットは非常に小さな反動をもたらしますが、これは原理的に銃身から出た後の弾丸の反動と同様です。マイクロロボット自体の質量は非常に小さいため、たとえこの力が非常に弱くても、十分な速度と急加速をもたらすことができます。
最新の研究では、研究者らはこのタイプの光駆動ロボットのサイズをさらに1ミクロン未満に縮小し、制御方法を簡素化したが、光子の反動に基づく推進機構はそのまま残した。
研究チームは、ロボット内のアンテナ ワイヤーが入射光の偏光方向と自然に一致するという事実を利用しました。光の偏光状態を調整することで、研究者はロボットの方向を制御することができ、ロボットの前進運動量は光子の反動から得られるため、その制御方法は巨視的輸送の「ステアリング+推進」モードに近くなる。
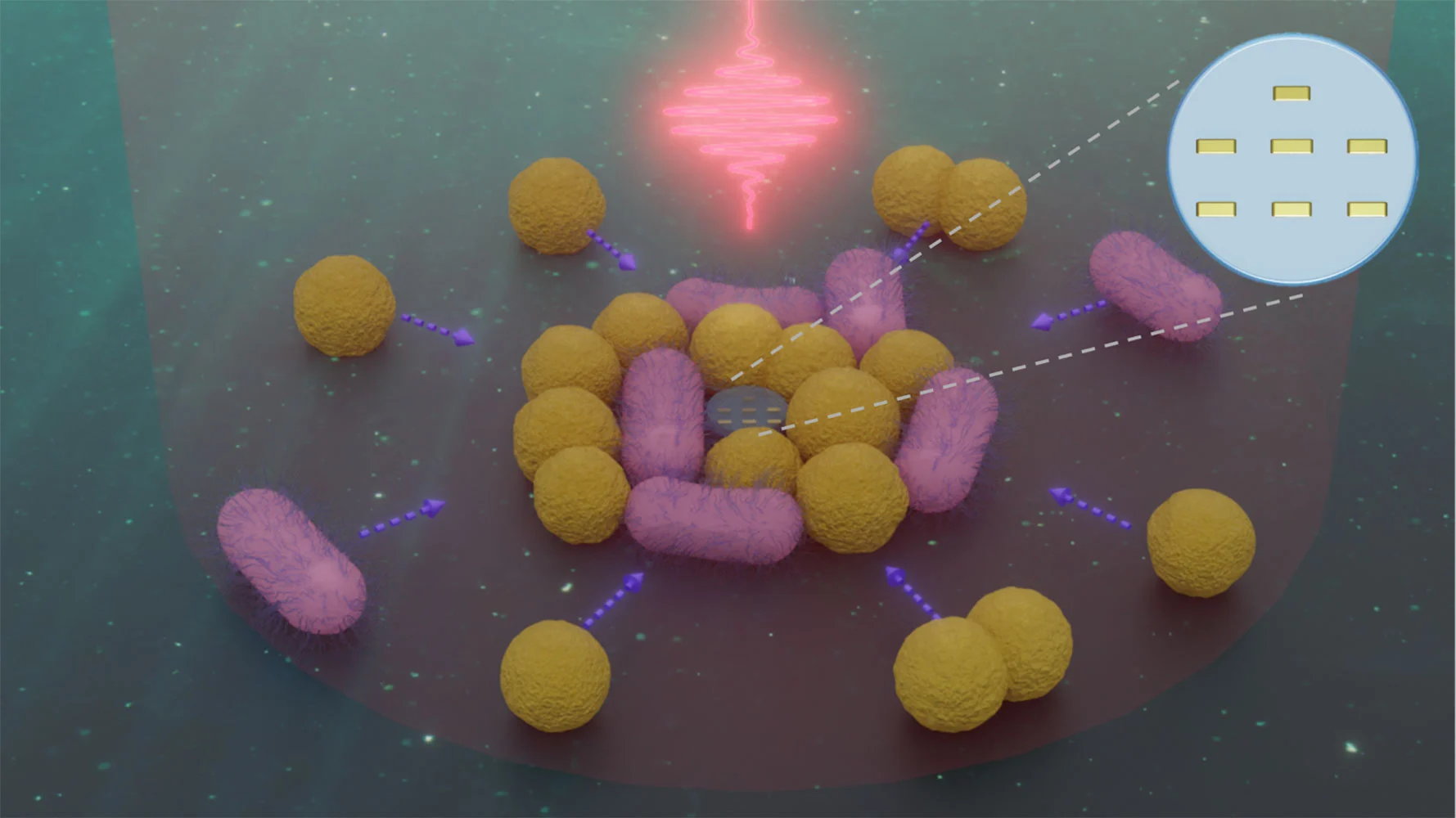
この論文の最初の実験科学者であるジン・チン氏は、チームが作ったのは本質的に光で駆動するナノロボットであり、バクテリアを閉じ込めて収集することができると述べた。構造の簡素化により、ロボットのサイズは微生物の活動に直接入り込める規模まで小型化されており、いわば「顕微鏡の洗浄装置」のようなものです。
研究者らは、この種のナノロボットは機動性が高く、90度の回転を素早く完了できるため、広いサンプル領域で体系的かつ効率的なスキャンを実行できると述べた。同時に、かなりの数の細菌を選択的に捕捉、輸送、放出することができます。
これは、制御された実験環境において、このタイプの装置は、微小環境に対して「洗浄」操作、つまり細菌を集中的に収集し、所定の場所に移動させることが期待されることを意味します。
Bert Hecht氏は、この成果は、光がミクロの世界を観察するために使用できるだけでなく、ミクロの世界を積極的に形作るためにも使用できることを鮮やかに示していると指摘しました。 「マイクロロボット掃除機」という概念は未来的に聞こえますが、関連する物理原理は現在実験的に検証されています。
より大きな細菌のクラスターを運んでいる場合でも、ナノロボットは移動速度がわずかに低下しますが、完全な機動性を維持します。研究チームは、この安定性により、微生物学、生物医学研究、超小規模精密制御などの分野での応用可能性がさらに強調されると考えています。
関連する研究論文のタイトルは「ナノスケール ロボット クリーナー」で、Jin Qin、Carsten Büchner、Wu Xiaofei、Bert Hecht の連名で、2026 年 3 月 27 日に出版されました。