スイスのEPFL工学部学習アルゴリズム・システム研究所(LASA)の研究チームは最近、ロボットの種類ごとに制御コードを書き換えたりカスタマイズしたりすることなく、構造の異なるロボットが同じ学習アルゴリズムのセットを通じて同じタスクを習得できるようにする新しい「運動学的インテリジェンス」学習方法を提案した。この成果により、産業および科学研究のシナリオで新しいロボットスキルを導入する時間とコストが大幅に削減されることが期待されます。
人間の世界では、私たちは約 30 万年にわたり、他人の行動を観察、模倣、調整することによって新しいスキルを学習してきました。これは、似たようなペアの間では比較的簡単に達成できます。しかし、対象を身体構造や認知方法がまったく異なる他の動物に置き換えると、単純な模倣は困難になります。植物、菌類、原生生物、さらには細菌についても、人間はそれらから運動能力を「学ぶ」ことについて話すことさえできません。ロボット工学の分野では、人間のデモンストレーションに従ってロボットに動作を実行させ、人間よりもはるかに速い速度でタスクを完了させることさえできたとしても、構造やシステムがまったく異なるロボットに同じ学習スキルを共有させる方法は依然として長期的な問題です。
Science Robotics に掲載された最新の論文で、Stithhpragya Gupta 氏、Aude Billard 氏らは、「デモンストレーションから学習する (LfD)」フレームワークの下で運動学的知能を使用することで、R2D2 や食器洗い機のように異なる形状のロボットが、同じ人間によるデモンストレーションとは別に実行できる新しい動作を学習できると提案しました。同じモデルのロボット間でスキルを伝達するだけだったこれまでのやり方とは異なり、このシステムはデモンストレーション動作を数学的にモデル化し、異なるロボットの関節レイアウト、可動範囲、安定性の制約に適応できる汎用戦略に変換します。
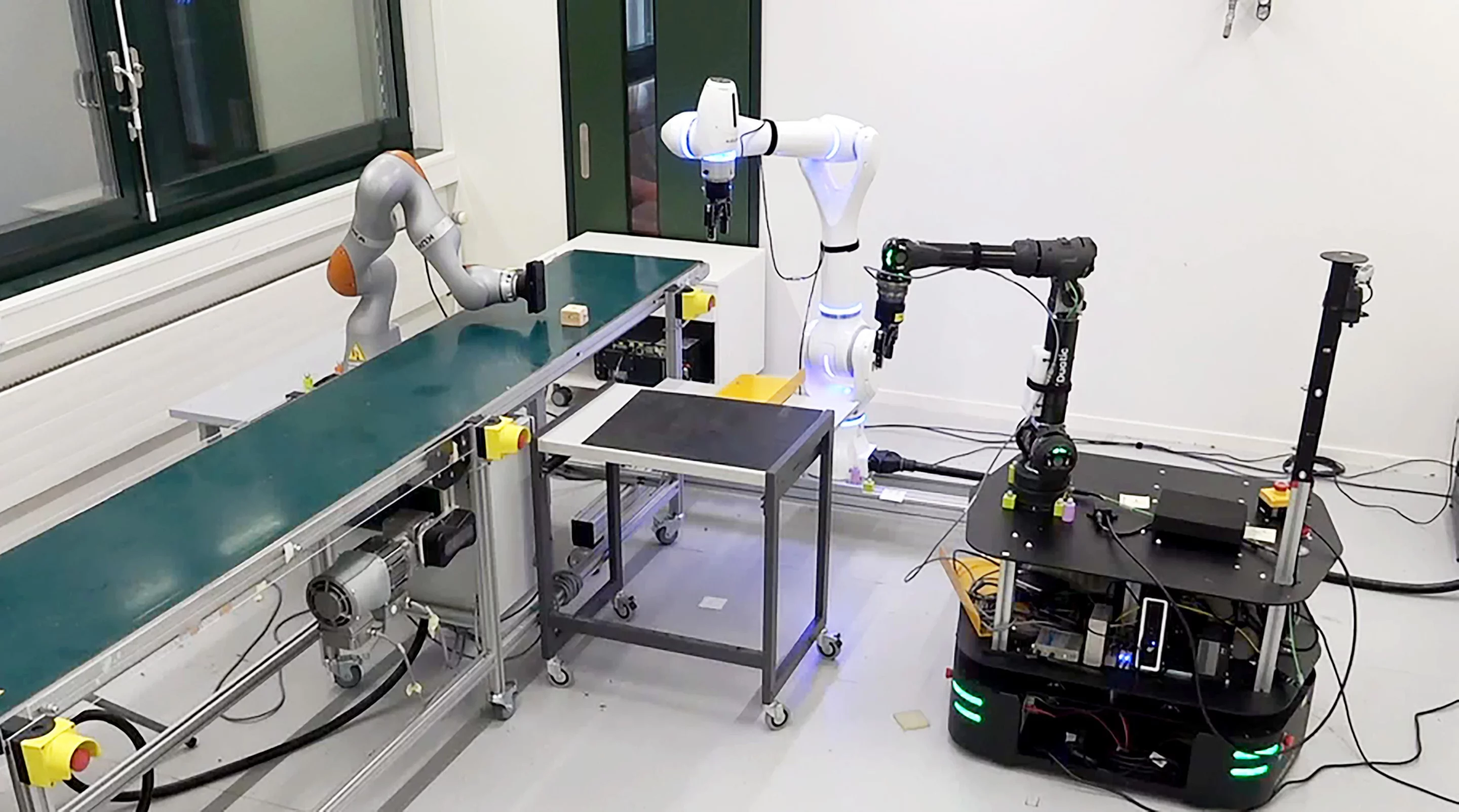
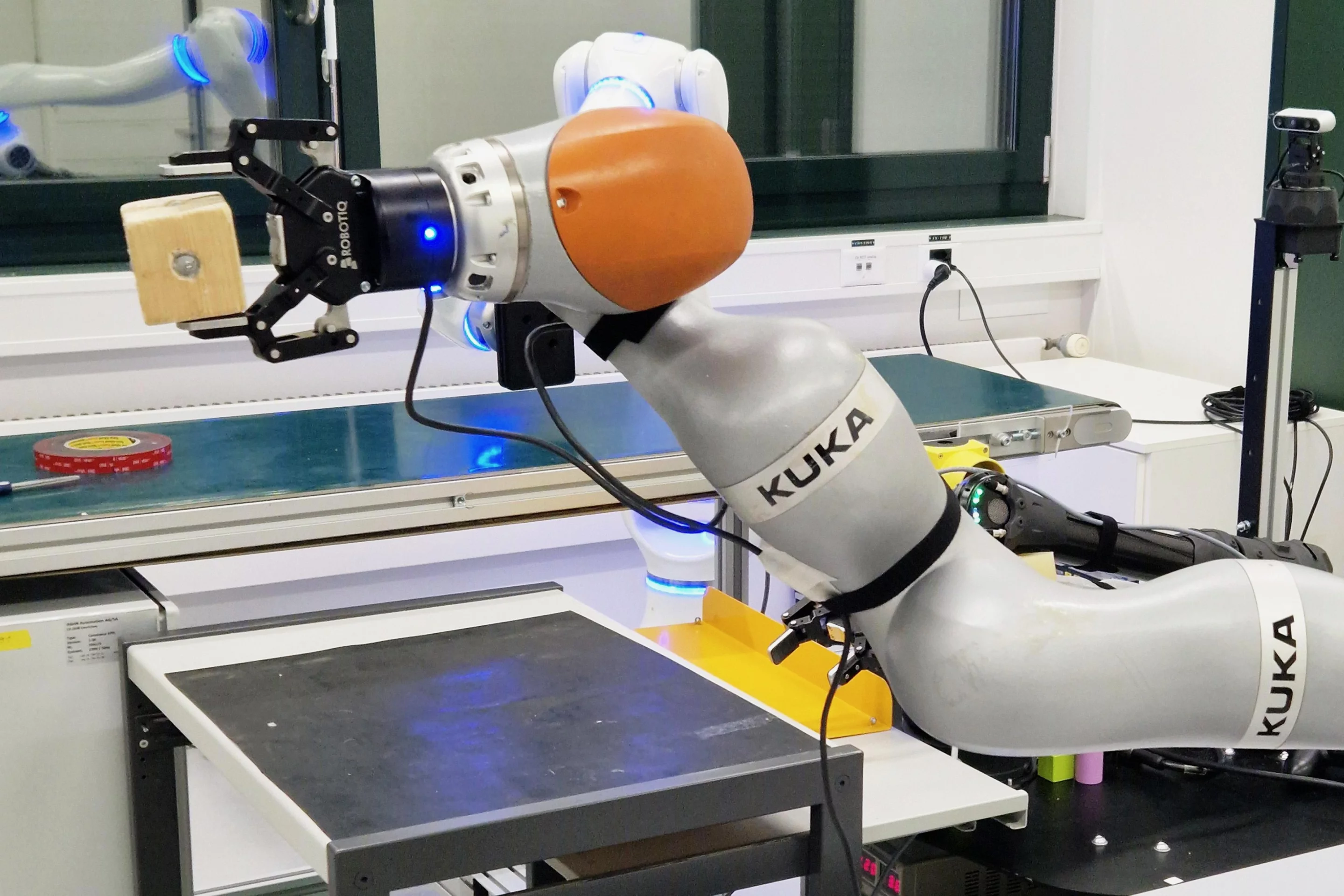
研究チームはまず、モーション キャプチャを使用して、産業組立シナリオにおける物体の配置、押し、投げなどの一連の操作を記録しました。その後、バランス制限や関節の可動範囲など、ロボットの物理的制約を記述する分類システムを確立し、この情報をモーション キャプチャ データと組み合わせて、さまざまなプラットフォームから呼び出すことができる観察および適応学習モデルを形成しました。実験では、形状も機構も全く異なる3台の市販ロボットが、人間の実演を観察するだけで、ベルトコンベアから作業ステーションまで木ブロックを押し出し、テーブルまで運び、最後に所定の容器に投げ込むという一連の作業を安定して完了することができた。
コア技術の 1 つは、いわゆる「グローバル安定動的システム」です。これにより、ロボットは、学習された動作空間内での動作プロセスの予測可能性と安全性を確保できます。研究者らは、タスクを実行する際に各ロボットが担当するステップは相互に調整可能であり、システムは引き続き正常に動作できると述べた。さまざまなロボットが同じスキルを理解し、自身の身体的条件と一致する方法で、しかし常に安全で実行可能な範囲内で再構築します。 LASA研究所所長のオード・ビラール氏は、この研究により、予測可能で安全な動作を確保しながら、機械構造の異なるロボット間で学習したスキルをどのように伝達するかというロボット工学における長年の課題が解決されると述べた。
アプリケーションの観点から見ると、この運動学的インテリジェンス フレームワークは、産業生産ラインやサービス シナリオでロボットを追加または置き換えるときに、新しいハードウェアごとにアクション コードを書き直す必要がないことを意味します。スキルの注入は、限られた数または 1 人の人間によるデモンストレーションを行うだけで完了します。これにより、専門的なプログラミングや制御理論の知識への依存が軽減されるだけでなく、中小企業が多様なロボット機器を使用する敷居も低くなります。論文の共同筆頭著者であるグプタ氏は、実験では各ロボットがタスクのステップを分割する方法がいつでも調整でき、システム全体が操作プロセスを正常に完了でき、高い柔軟性が示されたと強調した。
プロジェクトの次のステップは、人間のオペレーターが自分自身でデモンストレーション アクションを実行することなく、自然言語の記述を通じて対応する動作を生成および実行できるようにすることです。もう一人の共同筆頭著者である Durgesh Haribhaau Salunkhe 氏は、チームは技術的背景の要件を完全に排除したいと考えていると述べました。ユーザーはアイデアと望ましい動作を持ち込むだけでよく、残りはロボットがやってくれます。関連する研究が進み続ければ、この「スキルのクロスモーダル共有」学習方法が将来のロボット システムの基本機能となり、より現実世界のシナリオへのロボットの導入が加速すると予想されます。