たとえ世界最先端の昆虫超小型飛行体(MAV)を作ったとしても、安定して着陸できなければ最終的には役に立ちません。そのため、ハーバード大学の科学者は、関節を備えた蚊のような長い脚を備えた RoboBee を設計しました。
RoboBee には蚊を模倣した脚があり、将来のバージョンは捜索救助活動や作物の受粉に使用される可能性があります。
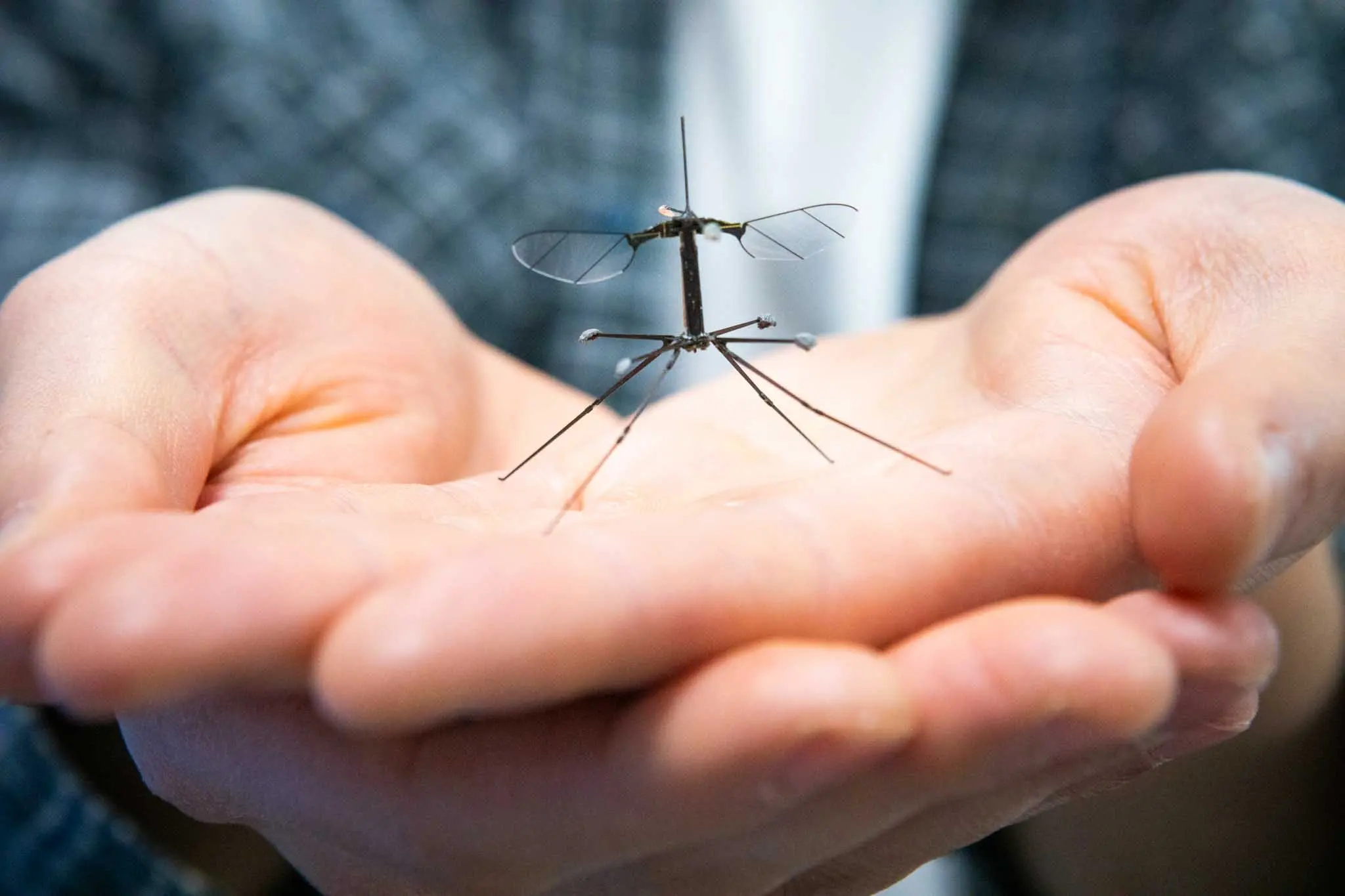
RoboBee に馴染みのない人のために簡単に説明すると、RoboBee は、人工筋肉を備えた一対の小さな羽を羽ばたかせて飛ぶ、ミツバチをイメージしたロボットです。翼を広げると 3 センチメートル (1.2 インチ) 未満で、重さはわずか 10 分の 1 グラムです。ただし、有線で電源とマイクロプロセッサに接続されています。そうは言っても、将来のバージョンは最終的には完全に独立して実行される可能性があります。実際、ソーラーバージョンはすでに存在します。
この小さなロボットの他のバージョンは、水中飛行やぶら下がり停止などの操縦が可能であることが証明されていますが、基本モデルは平らな(またはその他の)表面にうまく着陸できませんでした。地面に拘束されると翼の羽ばたきによって発生する渦が乱気流を引き起こし、ロボットのバランスを崩す可能性があるためです。
「以前は、着陸する場合、地面から少し離れたところで車両を停止させ、落下させ、直立して安全に着陸することを祈っていました」と、ロボットの機械的再設計を主導している工学系大学院生のクリスチャン・チャン氏は語った。

蚊は柔らかく着地する能力で知られています
RoboBee の 4 つの新しい脚は、蚊の脚からインスピレーションを得たもので、ロボットの体が地面効果乱気流の影響を受ける前に安全に地面に接触できるように十分な長さと柔軟性を備えています。
さらに、新しい制御アルゴリズムにより、ロボットが「ただ落ちる」のではなく、よりスムーズに着地するように誘導されます。

RoboBee が新しい脚を使って 1 つの葉から離陸し、別の葉に着陸する複数の露出
「多種多様な昆虫の中から生物学的なインスピレーションを見つけることで、ロボットを改良し続ける無数の方法が得られます」と博士研究員で研究論文の共著者であるアリッサ・ヘルナンデスは述べた。 「ひいては、これらのロボットプラットフォームを生物学研究のツールとして使用し、生体力学的仮説を検証する研究を実施することができます。」
この論文は最近、サイエンス・ロボティクス誌に掲載されました。下のビデオでは、RoboBee がガガンボの着陸動作を模倣しているのを見ることができます。
出典: ハーバード大学ジョン A. ポールソン工学応用科学大学院