米国のライス大学のチームは最近、EyeDARと呼ばれる新しい路側レーダーシステムを発表しました。これは、自動運転車に「第三の目」に似た拡張されたセンシング機能を提供すると期待されています。研究者らは、この技術は、道路インフラに配備されたミリ波レーダー装置を通じて重要な交通情報を車載システムに送り返すことにより、自動運転車の環境認識精度と安全性の冗長性を大幅に向上できると述べた。
既存の自動運転は主に、車載カメラ、ライダー (LiDAR)、および従来のレーダーの連携に依存しています。カメラは歩行者、車両、交通標識の識別を担当し、LiDAR はレーザー パルスを使用して高精度の 3 次元点群を構築し、空間奥行き認識における視覚とレーダーの欠点を補います。ただし、どちらも雨や雪、霧などの悪天候には弱いです。レーダーは電波を送受信することで光や天候に依存しない物標探知を実現します。しかし、実際の道路環境では、検知された物体からの反射信号が少なく、周囲に多数のレーダー波が散乱しているため、車両レーダーが受信する情報が不完全となり、歩行者や車両の遮断または部分遮断などの潜在リスクをタイムリーに正確に特定することが困難です。
自動運転トラックや配送ロボットなどが徐々に実用化に向けて進む中、複雑な道路状況で「はっきり見えない、遠くが見えない」というセンサーの限界が安全上の欠点としてみなされることが増えている。ライス大学のチームは、EyeDAR を使用して死角や情報のギャップを埋め、認識システムを車両から道路脇のインフラまで拡張しようとしています。本装置は低出力のミリ波レーダーを採用しており、信号機、標識、看板などの路側施設への設置が可能です。もともと環境に散乱した反射波を「収集」し、周囲の交通参加者のより完全な情報に変換して、車両の車載レーダー システムに送り返します。
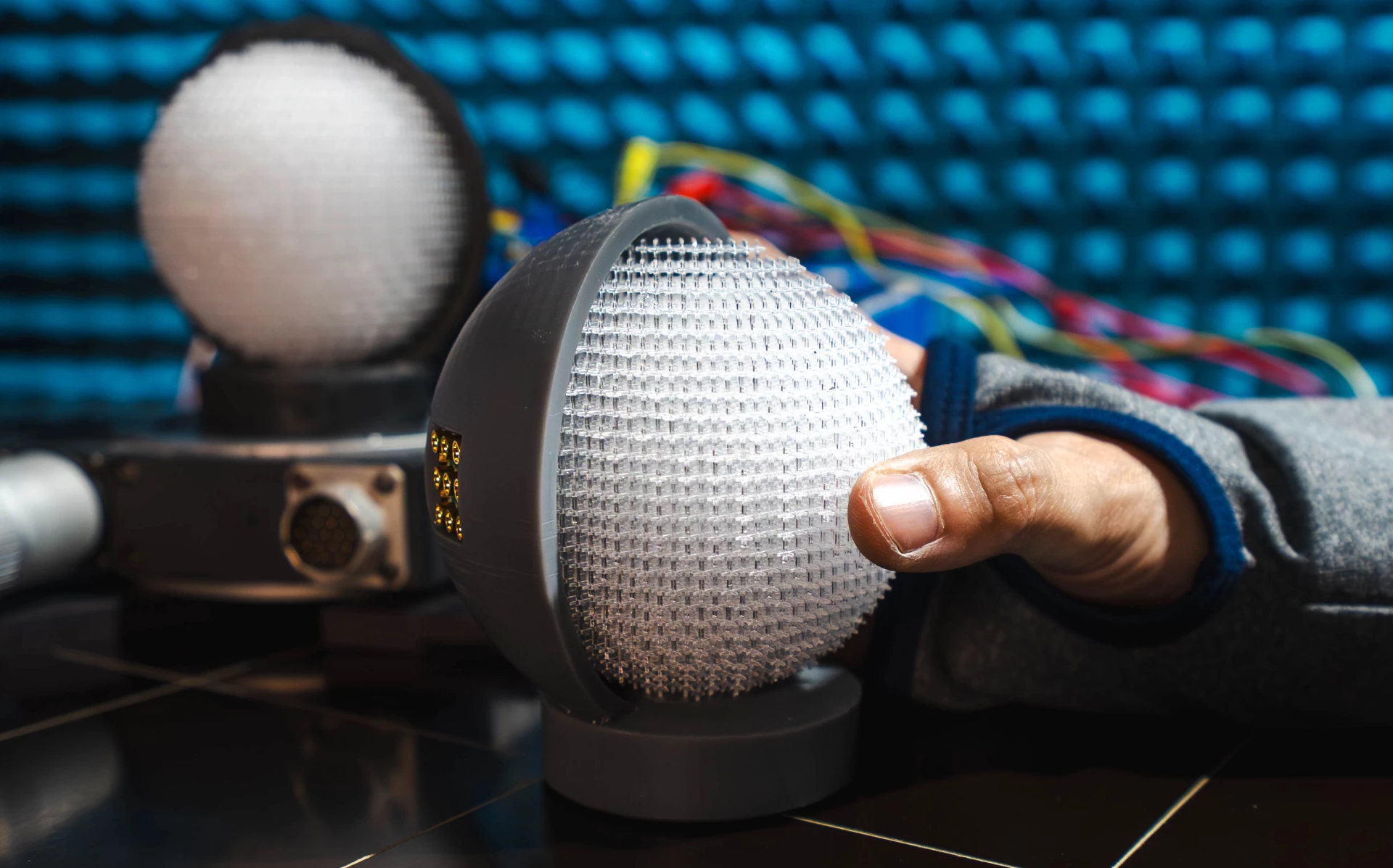
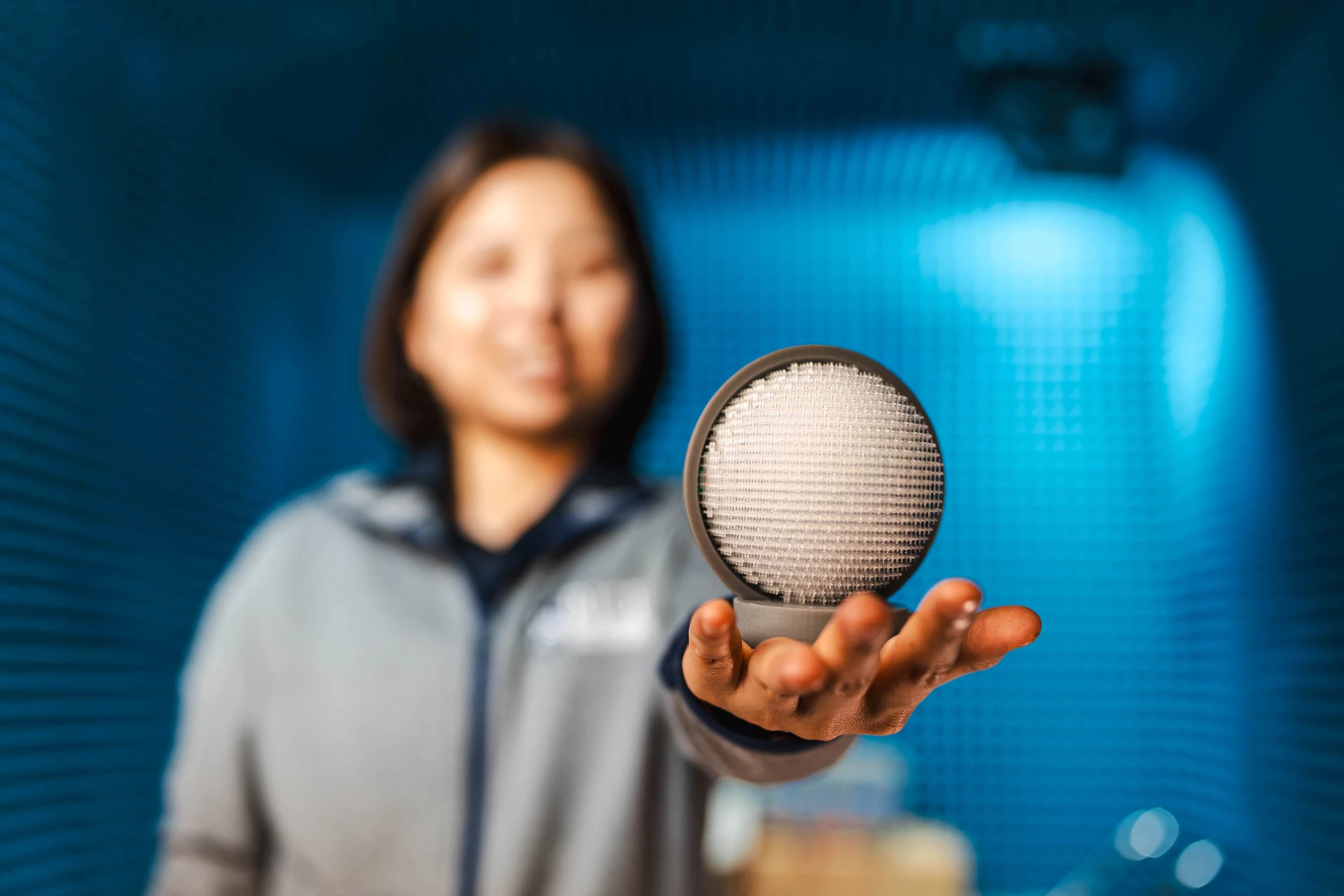
EyeDAR の中核は、オレンジくらいの大きさの感知ユニットで、「レンズ」と「網膜」に似た 2 つの部分で構成されています。フロントエンドは 3D プリンティング技術を使用して作られたリューネブルグ メタマテリアル レンズで、さまざまな方向からの無線信号を固定焦点に正確に集束させるために使用されます。続いて、密集して配置された一連のアンテナ アレイが、これらの焦点を合わせた信号の空間情報を受信して分析し、自動車レーダー システムにフィードバックする役割を果たします。ビームフォーミングと信号処理を完了するために大規模なアンテナ アレイと複雑なデジタル計算を必要とする従来のレーダー ソリューションとは異なり、EyeDAR はレンズ自体の物理構造に依存して大量の「前処理」作業を完了し、電子ハードウェアとアルゴリズムの負担を大幅に簡素化します。
研究チームによると、このレンズは形状や屈折率が異なる8,000個以上の小さなユニットで構成されているという。各ユニットの位置とパラメータは、電磁波が通過するときに材料全体が特定の方法で曲がり、集中できるように慎重に設計されています。これは本質的には「ハードウェア対ハードウェア」のアナログ信号プロセッサです。このメタマテリアル構造により、EyeDAR は光の速度で送信プロセス中に空間情報の事前計算を「瞬時に」完了できるため、従来のレーダーで行われていた時間とエネルギーを消費する大量のデジタル処理の必要性がなくなります。実験結果は、このシステムが従来のレーダーよりも 200 倍以上速くターゲットの方向を解決できることを示しており、これはデジタル処理と比較してアナログ処理のパフォーマンスが大幅に向上していると考えられています。

従来の路側レーダーやアクティブ送信装置とは異なり、EyeDAR自体が新たな電磁波を発生することはありません。代わりに、車両がターゲットを検出した後に外側に散乱する「残留」エコーを収集し、それらをフィルタリングして再構築し、「浄化された」信号を車両搭載レーダーに反射することに焦点を当てます。研究者らは、コンパクトで低コスト、シンプルなアーキテクチャを持ち、超高速シミュレーション処理に依存するこの設計は、都市部の道路や高速道路沿いの大規模な敷設をサポートし、それによって自動運転車の「遠方視野」と「遠近感」に役立つインフラストラクチャネットワークを形成できると考えています。
しかし、製造の専門家エメカ・モロヌ氏は、この計画が実際に実施できるかどうかについては依然として慎重な姿勢を示している。同氏は、理論モデルや実験データは興味深いものだが、実際の生産において何千もの微細構造ユニットを長期間にわたって安定して複製し、高温暴露や厳しい寒さ、凍結などの極端な屋外環境において幾何学的精度と性能を確実に維持することは、非常に困難な工学的課題であると指摘した。これは、EyeDAR が実験室から出て大規模な展開に移行するための最大の敷居の 1 つになる可能性もあります。
見通しを取り巻く不確実性にもかかわらず、ライス大学チームは、EyeDAR が自動運転の安全性に対する路側メタマテリアル レーダーの可能性を実証していると信じています。大規模に導入されると、車両はこれらの「路側の目」を利用して、自身のセンサーの検出範囲を超えた道路状況情報を取得し、曲がり角付近の交通参加者や大きな障害物によって遮られた歩行者や車両を早期に検出できるため、交通システム全体の安全冗長性が向上します。研究者らは、このテクノロジーが将来的にはドローン、ロボット、セキュリティ監視などのアプリケーションシナリオにも拡張され、さまざまな自律システムに対してより信頼性の高い環境認識サポートを提供できると予測しています。