Niantic は、かつてピカチュウを現実世界の歩道にしっかりと固定させていたのと同じ世界的な AR テクノロジーを、より現実的な主人公、つまり正しい家番号を探して歩道を往復する配達ロボットの演出に変えようとしています。同社は、長年にわたって蓄積した測位データとストリートビュー画像を通じて、現在ではセンチメートルレベルの高精度視覚測位サービスを Coco Robotics などの企業に提供しており、特に高層ビルが立ち並ぶ都市で従来の GPS が「失われる」という古い問題を解決しています。

Niantic Spatial は、2025 年に Niantic によって設立された AI スピンオフ企業で、長年にわたるモバイル ゲーム データを高精度の現実世界の「ワールド モデル」に抽出することに特化しています。公式説明によると、これはカメラ画像と地図コンテキストのみを頼りにセンチメートル範囲内でデバイスの位置と姿勢を決定できるビジュアルポジショニングシステム(VPS)で、商用インターフェイスを通じて外部世界にサービスを提供します。その最初の大規模商業パートナーは、ヨーロッパとアメリカの多くの都市で約 1,000 台の歩道ロボットを運用する最終配送会社である Coco Robotics です。ローカル衛星信号は、信頼性の高い自動運転をサポートするにはノイズが多すぎることがよくあります。
Niantic Spatial が解決すべき技術的問題を説明するのは難しいことではありませんが、真に克服するのは非常に困難です。高密度の都市環境では、GPS 信号がガラスのカーテンウォールとコンクリートの間で反射され、測位誤差が容易に数十メートルに達する可能性があります。配達ロボットにとって、この逸脱は、間違った地域、さらには道路の反対側に到達してしまう原因となるのに十分です。ココのロボットは時速約8マイルで巡航し、複数の特大ピザや食料品の袋を一度に配達できる。時間厳守や集配の正確さの点で人間のライダーに追いつきたいのであれば、より安定した正確なナビゲーション機能に依存する必要があります。
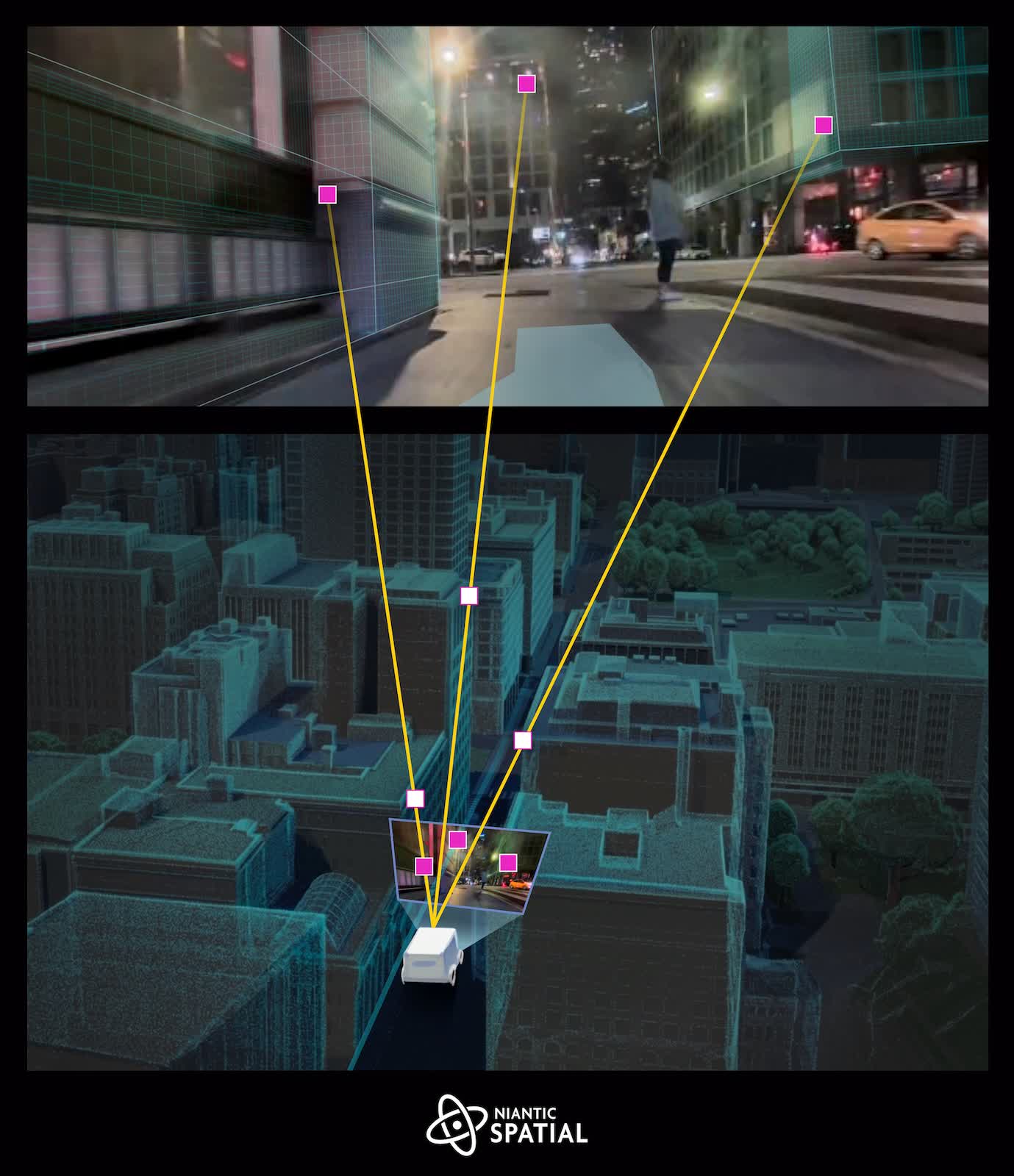
Niantic Spatial の代替案は、無線信号ではなく「視覚」に依存する視覚測位システムです。同社は長年にわたり、Pokémon Go とその初期の拡張現実ゲーム Ingress からのデータを収集しており、どちらもプレイヤーに現実世界のジム、バトル アリーナ、さまざまな名所への訪問を奨励しています。このゲーム メカニズムは、目に見えないように高密度のグローバル都市データ セットを構築します。都市環境でプレイヤーが撮影した大量の画像は、経度と緯度、カメラの向き、デバイスの姿勢、動作ステータス、および携帯電話によって記録されたその他のセンサー データに正確に関連付けられます。
Niantic Spatial によると、そのモデル トレーニング データには約 300 億枚の画像が含まれており、これらの画像は、さまざまな角度、さまざまな時間帯、さまざまな気象条件で繰り返し撮影された 100 万以上の「ホットスポット」の場所の周囲に高度にクラスター化されています。各フレームはセンチメートルレベルの姿勢推定に対応するため、このトレーニング セットは基本的に、街路、横断歩道、店先、建物のファサードをカバーするマルチビュー 3D サンプリングを構成します。これに基づいて、モデルは、元のデータ カバレッジがこれらのホット スポットほど密ではない領域であっても、リアルタイムで撮影された少数の画像から正確な位置と方向を推測できます。
ココにとって、これは自社のロボットが GPS 信号と Niantic Spatial が提供するカメラの測位結果を融合できることを意味します。各ロボットには「腰の高さ」に設置された4台のカメラが搭載されており、4方向から撮影が可能です。この視点は人間が携帯電話を手に持つ視点とは異なりますが、この種のデータを既存のモデルに適応させるのは比較的直感的だとココ氏は述べています。現在、これらのロボットはロサンゼルス、シカゴ、マイアミ、ジャージーシティ、ヘルシンキなどで数十万件の配達を完了し、合計100万マイル以上を移動しており、同社は新しいシステムの信頼性向上を評価するための基準を提供している。

視覚的な位置決め自体は新しい概念ではありませんが、収集密度と高品質画像の範囲によって長い間制限されてきました。 Niantic Spatial は、クラウドソーシングによるゲーム データの量と多様性が、主に独自のセンサー群に依存してマップを収集する競合他社を上回るパフォーマンスを発揮すると賭けています。他の一部の配送ロボット メーカー (Starship Technologies など) は通常、独自のセンサーを通じて走行経路上にローカル 3D マップを構築し、縁石、道路標識、建物の輪郭などを記録し、その後の移動中にこれらのマップを再利用します。対照的に、Niantic Spatial は、世界的に共有される地理空間モデルを維持し、API を通じて正確な位置情報を必要とするあらゆるロボット、電話、ヘッドセットで利用できるようにしたいと考えています。
Niantic はこのモデルを「リビング マップ」と呼んでいます。これは、センサーによって常に更新される世界の仮想表現です。ココのロボットとさらなる将来のパートナーが道路や歩道を移動するにつれて、それらのセンサーは新しい観測値を返し続け、Niantic Spatial の基礎となる地図を修正および拡張するために使用されます。目標は、幾何学的精度だけでなく、意味的な理解、つまり、機械が理解できる方法でマップ内のさまざまな種類のオブジェクトに注釈を付けて説明することです。
ナイアンティック幹部らは、この取り組みを完全な逆転ではなく、デジタル地図の長期的な進化の一環と見ている。 2D マップから 3D、そしてダイナミックな「デジタル ツイン」に移行するアナログ世界に至るまで、マップ座標と物理空間の間の核となる接続は変わりません。本当に変わったのは、そのような地図の「主な消費者」、つまり過去の人々から機械になったことです。この観点から、仮想のピカチュウが歩道にしっかりと立っているかどうかを確認するために使用された空間インテリジェンスは、現在、重さ 100 ポンドで、風、雨、交通の中でも安定したルートを維持する必要がある配送ロボットに移植されています。