しばらくの間、エネルギーを消費せずに 2 つの状態を維持できる「双安定」デバイスについて耳にするようになりました。双安定装置は、2 つの安定状態の間で切り替えることができる張力装置ですが、どちらの状態を維持するにも電気を必要としません。植物の種子のさやからインスピレーションを得た新しいデバイスは、頑丈で起動が簡単なロボット グリッパーの形をしています。
金属製のヘアピンは、接触によって物体を掴むことができる日常品の良い例です。これらのアイテムの場合、通常、グラブホールドアクションをトリガーするために多くの圧力を加えたくありません。これは、グラバーの「エネルギーバリア」を低くすることを意味します。
問題は、エネルギー障壁が低い双安定デバイスには、掴む物体を掴むのに十分な電力がないことが多いということです。言い換えれば、重い物体や外力によって引っ張られる物体のコントロールを失う可能性が高くなります。
私たちが必要としているのは、最初に物体を掴むときはエネルギー障壁が低いが、物体が掴まれるとエネルギー障壁が増加するグラバーです。オブジェクトを解放する時が来ると、エネルギー障壁は再び低くなります。
この要件を念頭に置いて、中国の科学者チームはインパチェンスの双安定種子鞘を研究しました。

ポッド内の種子が未熟で分散できない限り、ポッドは高いエネルギー障壁を維持し、トリガーするのが困難になります。しかし、種子が成熟すると、このエネルギー障壁は弱まります。したがって、雨滴の圧力でも、サヤが周囲の土壌に種子を飛ばすのに十分です。
バイオニック双安定グリッパーの概略図
中国中山大学のYang Jinzhao博士、中山大学のWu Jianing博士、大連理工大学のPeng Haijun博士
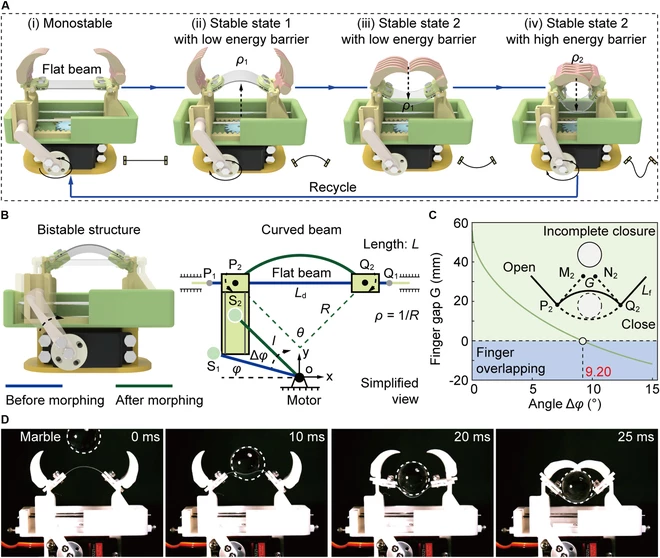
インパチェンスの莢から着想を得たこのグリッパーは、2本の掴む「指」で構成されており、その基部は伸縮性のある梁の両端に接続されています。フィンガーをビームに接続する 2 つのクランプは、それぞれモーターによって駆動される回転シャフトに接続されています。
ホルダーのデフォルトの中立状態では、ビームは平らで張力がありません。ただし、物体をつかむ必要がある場合は、シャフトが回転し、ビームがわずかに上方に曲がります。これにより、張力下ではエネルギー障壁が低い双安定状態になります。
そのため、グリッパーが物体の周囲に置かれ、その物体が上向きに曲がるビームを押すと、ビームが下向きに曲がる方向に跳ね上がり、同時に指を物体に向かって引っ張ります。
これが起こると、シャフトが反対方向に回転し、ビームがさらに下方に曲がります。これにより、エネルギー障壁が増加し、グリッパーによるアイテムのグリップが強化され、固定されます。
この技術のデモンストレーションでは、グリッパーの 1 つがクアッドコプター ドローンの上部に取り付けられ、ドローンがその場でホバリングせずに木の枝、手すり、その他の物体にぶら下がることができました。ビームモーターはビーム張力を調整するときにある程度の電力を消費しますが、対象物のグリップを維持するために電力は必要ありません。従来のグリッパーではこのようなことは起こりません。

研究に使われるドローン
中山大学のJianing Wu博士は、「当社のロボットグリッパーは、速い応答速度、プログラム可能な相互作用力、シンプルで効率的な設計を備えており、次世代ロボットシステムに新たな道を切り開きます」と述べた。ウー博士は、大連理工大学の彭海軍博士と共同でプロジェクトを主導しました。 「このユニークな機構によりロボットの能力が大幅に拡張され、さまざまな分野での活用が可能になります。」
この研究に関する論文は最近、Research誌に掲載されました。