スイスのローザンヌ工科大学(EPFL)のエンジニアが「手」の概念を再考したとき、最も基本的な設定の 1 つである手を腕に固定しなければならないという設定を意図的に放棄しました。彼らは、ロボット アームから取り外して、小さな生き物のように表面を這い、ほぼあらゆる方向から物体に近づいて掴むことができるロボット ハンドを開発しました。これは、将来の産業検査およびメンテナンス作業に新しい操作ツールを提供します。
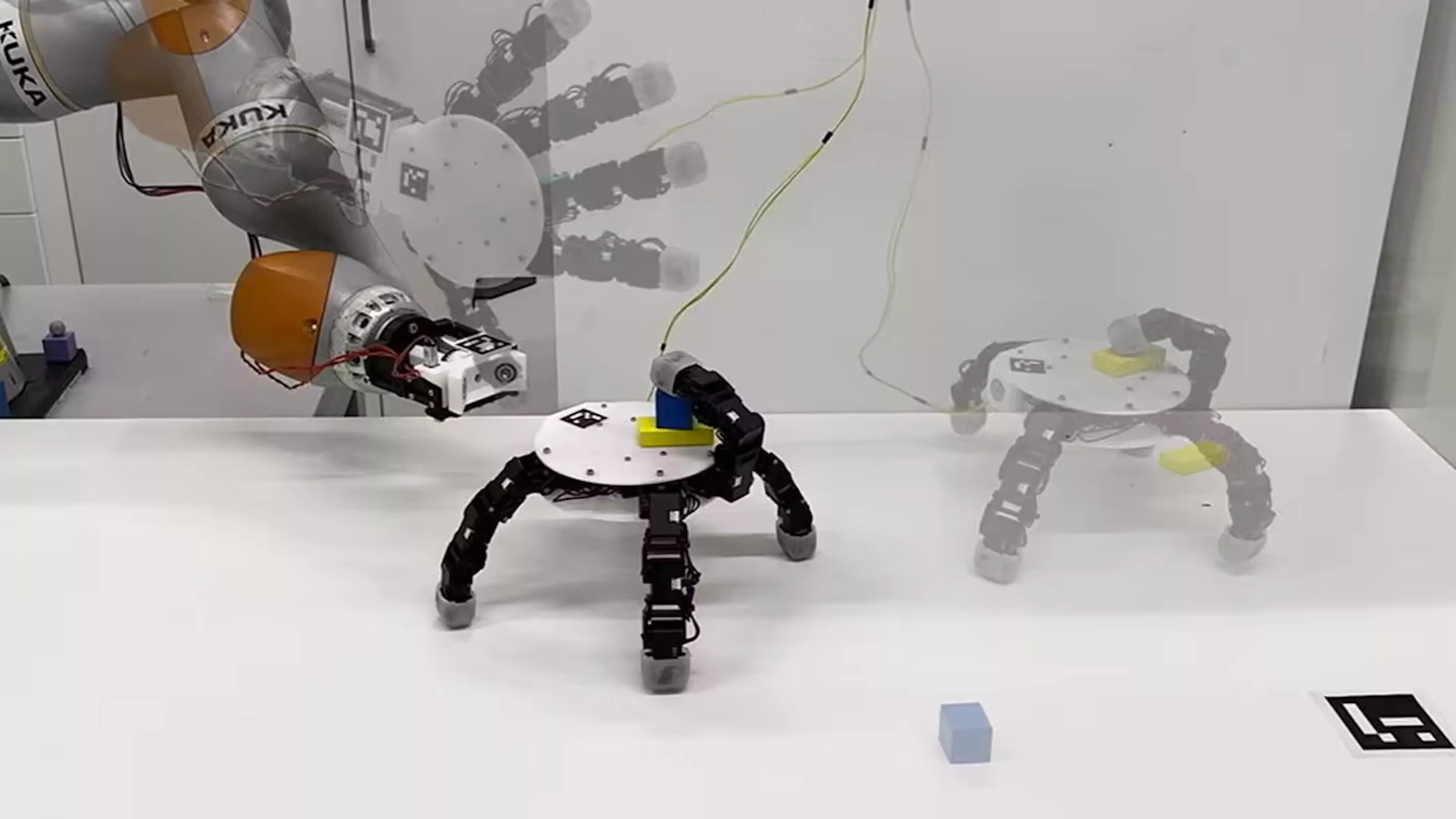
ロボット アームの端に固定されている従来のマニピュレータとは異なり、この新しいデバイスは「デュアルモード」マニピュレータです。通常のエンド エフェクタとして使用することも、ロボット アームからロックを解除した後に独立して移動することもできます。切り離されると、指の間の調整された動きに依存して、さまざまな方向に這ったり、回転したり、位置を変えたりして、目標物体に積極的に近づきます。このデザインは「手足」と「可動機械」の境界をある程度あいまいにしており、研究チームはSFの概念ではなく、ロボットの形態の実用的な進化とみている。
このプロジェクトを主導するのは、EPFL で研究を行い、現在は武漢大学に在籍している Gao Xiao 氏です。同氏はフィナンシャル・タイムズに対し、チームの目標は、生物学的であれ機械的であれ、運用作業において「手」ができることの限界を拡大することだと語った。一本の親指に依存して残りの指に対抗する人間の手とは異なり、このロボットハンドの各指は他の指と対立関係を形成できます。このカウンターフィンガー構造により、システムは人間の手よりもはるかに柔軟性が高く、さまざまな指の組み合わせを切り替えて、つまむ、クランプする、持ち上げるなど、さまざまな方法でターゲットを正確に操作できます。
構造上の革新として、この手は人間の手にはない「前後両方向から掴む」能力も備えています。人間の指は生理学的に掌背方向から物体を効率的に掴むことができないが、このシステムは前後方向から安定して物体を掴むことができる。これにより、複数の物体を同時に把握できるだけでなく、ツールやターゲットを操作する際の「同時並行マルチタスク」の余地も生まれます。
実証実験では、ボトル本体を固定しながらボトルのキャップを外したり、ワークを安定させながら別のツールでトルクを加えたりするなど、通常は2人の手の協力が必要な作業をこのロボットハンドが実行しました。異なる指の反対の組み合わせを柔軟にスケジュールすることで、従来の両手コラボレーション シナリオの一部の操作モードをシミュレートしたり、それを超えることさえできます。
Gao Xiao 氏は、チームの設計の出発点はステルスや監視の目的ではなく、「機能制御」だったと強調しました。研究者らは、その最も潜在的な応用シナリオは、パイプラインや設備内の状態検査、メンテナンス部品の分解と組み立て、狭いスペースでの落下したワークの回収など、産業の最前線にあると考えています。これらの用途では、従来の完全なロボット アームや人間のオペレーターは現場に侵入できないことがよくありますが、独立して移動できる小型の「這う手」は、手の届きにくい場所にアクセスして操作できます。
研究チームは、将来のロボットシステムでは、モバイルプラットフォームとそのような取り外し可能なロボットハンドを組み合わせることができると構想している。モバイルプラットフォームは複雑な現場の機器の検査とアクセスを担当し、ロボットハンドは必要に応じてプラットフォームやロボットアームから取り外し、狭いスペースの奥深くに入り込んで、瓦礫の清掃、バルブの操作、機器の掴みなどの作業を完了します。この分業とコラボレーションの構造により、複雑な環境における産業オートメーション システムの適応性とタスク完了率が向上すると期待されています。
この研究はロボット工学コミュニティの注目も集めています。オックスフォード大学ロボット研究所のディグビー・チャペル准教授は、このロボットハンドは「興味深く挑発的」であり、産業オートメーションや義肢研究などの分野で啓発的な意義があるとコメントした。同氏は、プロトタイプの這う速度は現時点ではそれほど速くないものの、「移動と把握」の相乗効果を実現する能力がすでに「ロボットハンド」の可能な形態を再定義していると指摘した。
現在、この「這う手」はまだ研究室試作段階にある。しかし、人間の解剖学的構造を模倣することとはまったく異なる道を明らかに示しています。ロボット工学の次のステップは、もはや「人間に似ている」ことに限定されず、産業的および実用的なニーズを中心に、より適応性があり、多目的で、モジュール化された方向に進化する可能性があります。