ロンドンのクイーン・メアリー大学とユニバーシティ・カレッジ・ロンドンの研究チームは最近、人間がこれまで認識されていなかった感覚能力「リモートタッチ」、つまり対象物体に直接接触する前に媒体中の弱い機械的摂動を通じてその存在を感知できる能力を持っている可能性があることを初めて提案する研究結果を発表した。この発見は、人間の接触は「必要な密着した接触のみ」という従来の認識の枠組みを変えたと考えられ、ロボットや各種支援機器の設計に新たなアイデアをもたらすことが期待される。
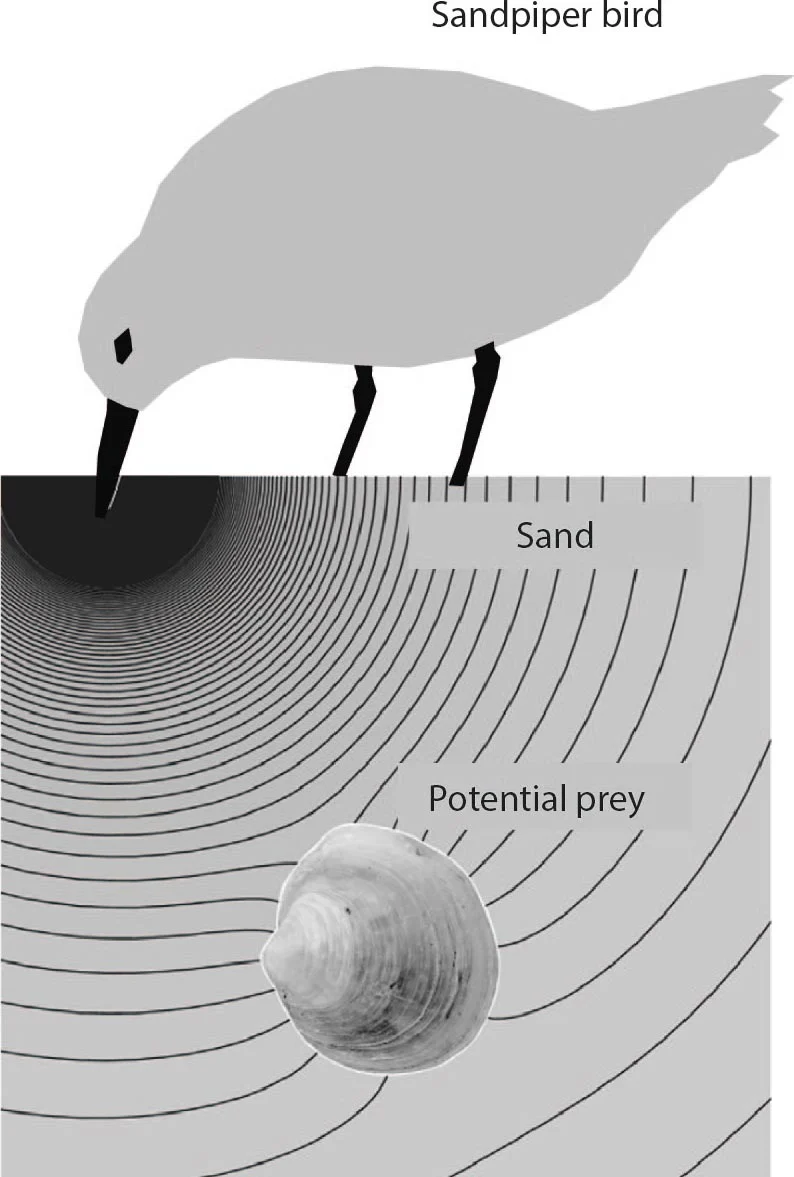
人間の接触は長い間、皮膚と物体との直接接触に大きく依存する近距離の感覚とみなされてきましたが、動物が世界をどのように認識しているかに関する研究は、徐々に異なる証拠を生み出しています。たとえば、シギやチドリなどの一部のシギ・チドリは、長距離タッチとして知られる砂の中の非常に微妙な機械的乱れを感知することによって、砂の下に埋もれた獲物を見つけることができることがわかっています。このメカニズムでは、周囲の物体が動くと、粒状媒体内に小さな圧力変化や運動反射が生じ、動物は高感度の触覚システムを通じてこれらの信号を捕捉します。

最新の研究は、これに基づいて「人間には同様の能力があるのか?」という疑問を提起しています。研究チームは、2025年のIEEE「開発と学習に関する国際会議」(ICDL)で関連する実験計画と結果を報告した。実験では、被験者に砂を詰めた箱の上で指をそっと滑らせ、対象物に触れる前に、箱内の定位置にブロックが埋まっているかどうかを確認してもらいました。研究チームはブロックの位置を制御し、LEDライトストリップを使用して被験者のストローク軌道をガイドし、それによって被験者の判断能力を系統的に記録した。
実験の結果、人間の参加者は埋もれたブロックに直接触れることなく、偶然よりもはるかに高い精度で埋設ブロックの存在を感知できることがわかりました。これは、人間の指が砂の表面をなぞると、その下に固体が存在するため、砂粒の方向や抵抗に非常に小さな変化を実際に感じることができることを意味します。さらに物理モデリング分析により、この知覚能力の感度が理論で予測される機械的反射検出限界に近いことが指摘され、人間の手の触覚システムが従来の理解における「粗い」ものよりもはるかに洗練されていることが示されました。
リモートタッチにおける人間と機械のパフォーマンスを比較するために、チームは並行したロボット実験も設計しました。ロボット実験では、研究者らは触覚センサーを備えたUR5ロボットアームを使用して砂に埋められたブロックも検出し、長短期記憶(LSTM)アルゴリズムを使用してセンシングデータを学習および判断した。その結果、理論上の検出可能範囲内において、被験者の判断精度は約70.7%であることがわかりました。ロボットは平均検出距離でわずかに優れていますが、誤報が多いため、全体の精度はわずか 40% です。
研究者らは、両方の性能が物理モデルによって予測される最大感度限界に非常に近いことを指摘し、これは粒状媒体におけるリモートタッチの「物理的境界」を裏付けるものであると指摘した。さらに注目すべきことは、人間と機械の実験の間にはポジティブな相互作用があることです。人間の実験は機械学習戦略のインスピレーションを提供し、機械のパフォーマンスは研究者が人間の行動データを新しい視点から解釈するのに役立ちます。研究チームは、心理学とロボット工学のこの組み合わせは、基礎的な認知研究と技術革新における学際的な協力の可能性を実証していると考えています。
論文の筆頭著者でロンドンのクイーンメリー大学先端ロボット工学研究室の博士課程学生であるChen Zhengqi氏は、この発見は人間の触覚能力を拡張できるツールや支援技術の設計に新たな方向性を開くものだと述べた。たとえば、将来的には、文化遺物を破壊することなく、砂に埋もれたターゲットを見つけるための考古学発掘用の高度な検出装置が開発される可能性があります。同じ原理は、火星などの星の表面の砂利探査や、海底の砂環境での捜索救助にも使用されることが期待されており、視界が限られた環境や危険な状況でさえも「ブラインド探査」ミッションをより安全かつ効率的に実行できるようになります。
研究を主導したロンドンのクイーン・メアリー大学プレペアド・マインド研究所の心理学上級講師エリザベッタ・ヴェルサーチ氏は、人体に対する遠隔接触が体系的に研究されたのはこれが初めてであり、人間の「知覚世界の範囲」(いわゆる受容野)の境界は、これまで認識されていたものをはるかに超えている可能性があると指摘した。彼女は、この研究が人間の知覚システムの理論的理解を拡大するだけでなく、人々が複雑な環境とどのように相互作用するかについての新しいアイデアを提供すると信じています。
論文の共著者でユニバーシティ・カレッジ・ロンドンのロボット工学と人工知能の准教授であるロレンツォ・ハモネ氏は、この研究の特別な点は、人体実験とロボット実験がお互いを「借りている」ことだと強調した。彼の見解では、この種の分野を超えた協力は、研究者が人間のまだ発見されていない感覚能力を特定するのに役立つだけでなく、人間のような触覚「直観」を備えたロボットの開発の基礎も築くことができます。将来的には、センサー技術とアルゴリズムのさらなる発展に伴い、リモートタッチは、暗闇、濁り、深い埋葬などの極限の現場でロボットがタスクを完了するための重要な機能の1つになることが予想されます。
この研究は「粒状メディアにおけるオブジェクト位置特定のための触覚の探求:人間とロボットの研究」と題され、2025 IEEE International Conference on Development and Learningの議事録に掲載されました。この研究には 2 つの主要な実験が含まれていました。1 つは、砂に埋もれた物体の触覚手がかりに対する人間の指先の感度を評価することに焦点を当てたもので、もう 1 つは、触覚を備えたロボットアームと長期短期記憶モデルを組み合わせて、対象が存在するかどうかを判断するものでした。研究チームは、フォローアップ作業で他の媒体(土壌や異なる粒子サイズの混合物など)におけるリモートタッチの性能をさらに調査し、日常生活や専門的な作業における実際の応用に対するこの能力の可能性を評価すると述べた。