米国のウェストバージニア大学の研究チームはこのほど、イチゴなどの傷つきやすい青果物を優しく摘み取るだけでなく、摘み取り作業中に触覚と視覚で熟度を総合的に判断できる、柔らかくても強力なソフトロボットハンドを開発し、摘み取り作業の人件費や廃棄率の大幅な削減が期待されている。
報告によると、農業はロボット技術の影響をますます受けている産業の一つになりつつあります。世界中の多くの地域の農家は、労働力不足と人件費の上昇という二重の圧力に直面しています。作物によっては、手作業による収穫コストが総生産コストの半分近くになることもあります。イチゴ、ラズベリー、アボカドなど、ピッキングウィンドウが非常に短く傷つきやすい果物や野菜の場合、従来の手動ピッキングや厳密な機械ピッキングでは効率と損失のバランスをとることが困難なことがよくあります。その結果、農家は収量の最大4分の1を失う可能性があります。
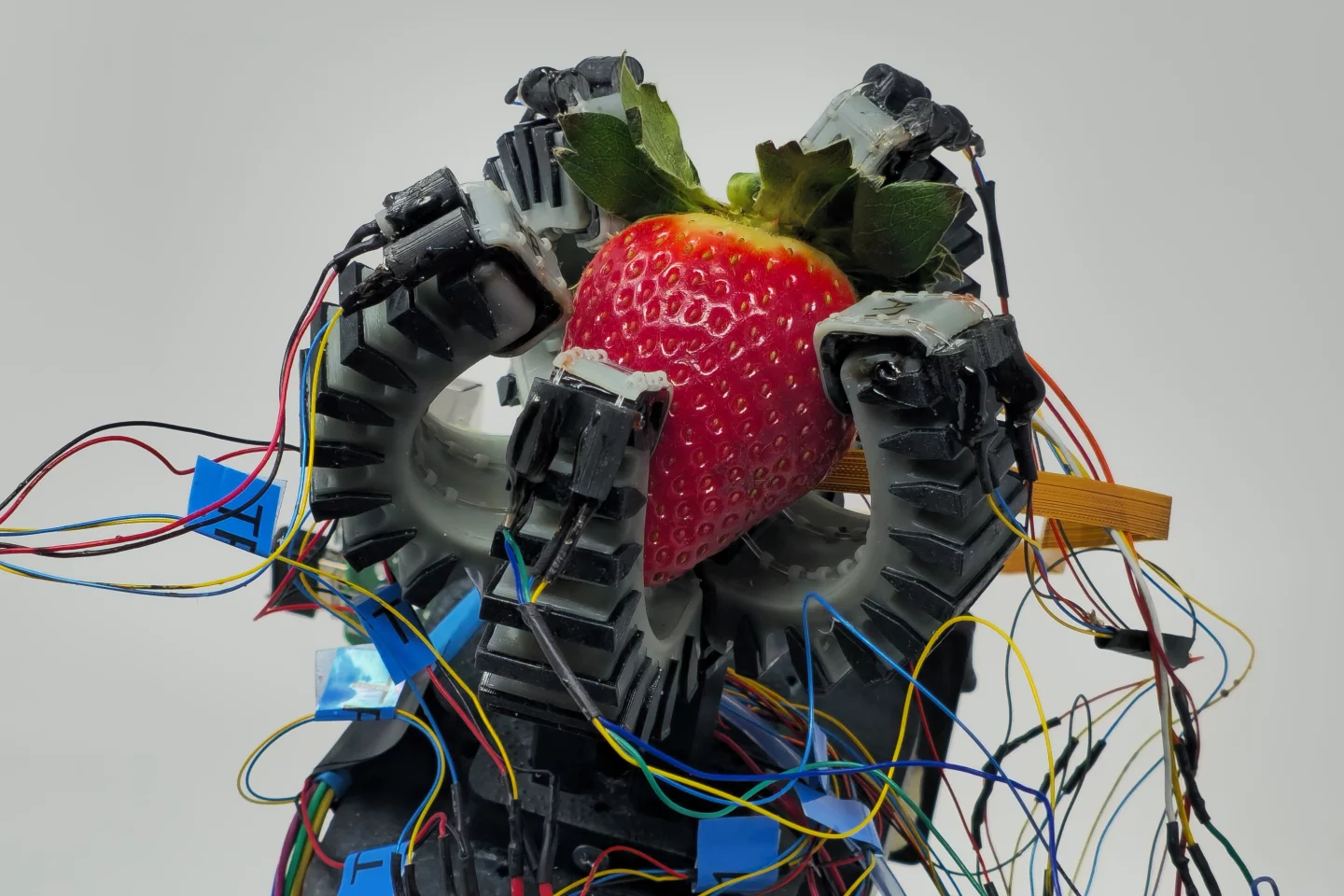
ウェストバージニア大学の「ロボティクスラボ」チームは、動物の動きを模倣するロボットの開発に取り組んでいる。今回発売されたソフトロボットハンドは、人々が思い浮かべる金属製の「機械の爪」ではありません。代わりに、ヒトデの解剖学からインスピレーションを得て、シリコンとポリウレタンの素材を使用して柔らかい指を作りました。同時に、全体的な形状は人間の手と同様の 5 本の指の配置を維持しているため、より自然に果物をつまみ、保持することができます。
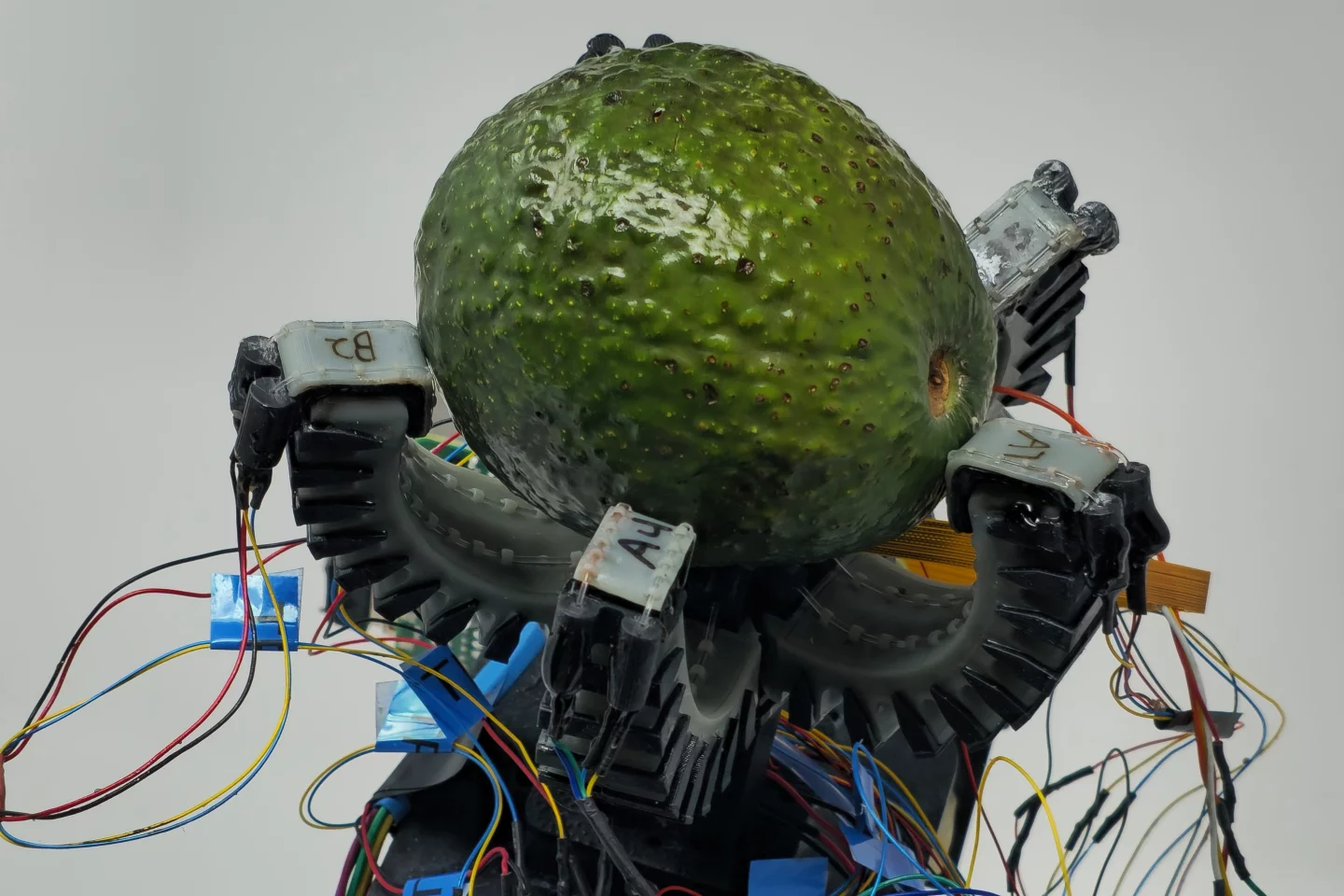
知覚機能の面では、この新しいロボットハンドには、果物の外観を視覚的に判断するための小型カメラが搭載されています。この機能は一部の農業ロボットに搭載されています。しかし、研究者らは、外観だけに頼るだけでは熟度を正確に判断するのに十分ではないと指摘した。アボカドを例に挙げると、多くの場合、優しくつまんで熟度を感知する必要があります。この「人間の直観的」な判断をロボットにどのように学習させるかが、この研究における重要な課題の一つとなっている。
この問題を解決するために、研究チームは柔らかい指の中に特殊な触覚センサーを埋め込み、ロボットが果物を優しく握ると、果物を潰さずに硬さや弾力に関する物理情報を取得できるようにした。これらのセンサーは保持力をリアルタイムで監視することもできます。現在のグリップが十分にしっかりしていないとシステムが判断すると、ロボットは果物が滑ったり地面に落ちたりするのを防ぐために力を自動的に微調整します。
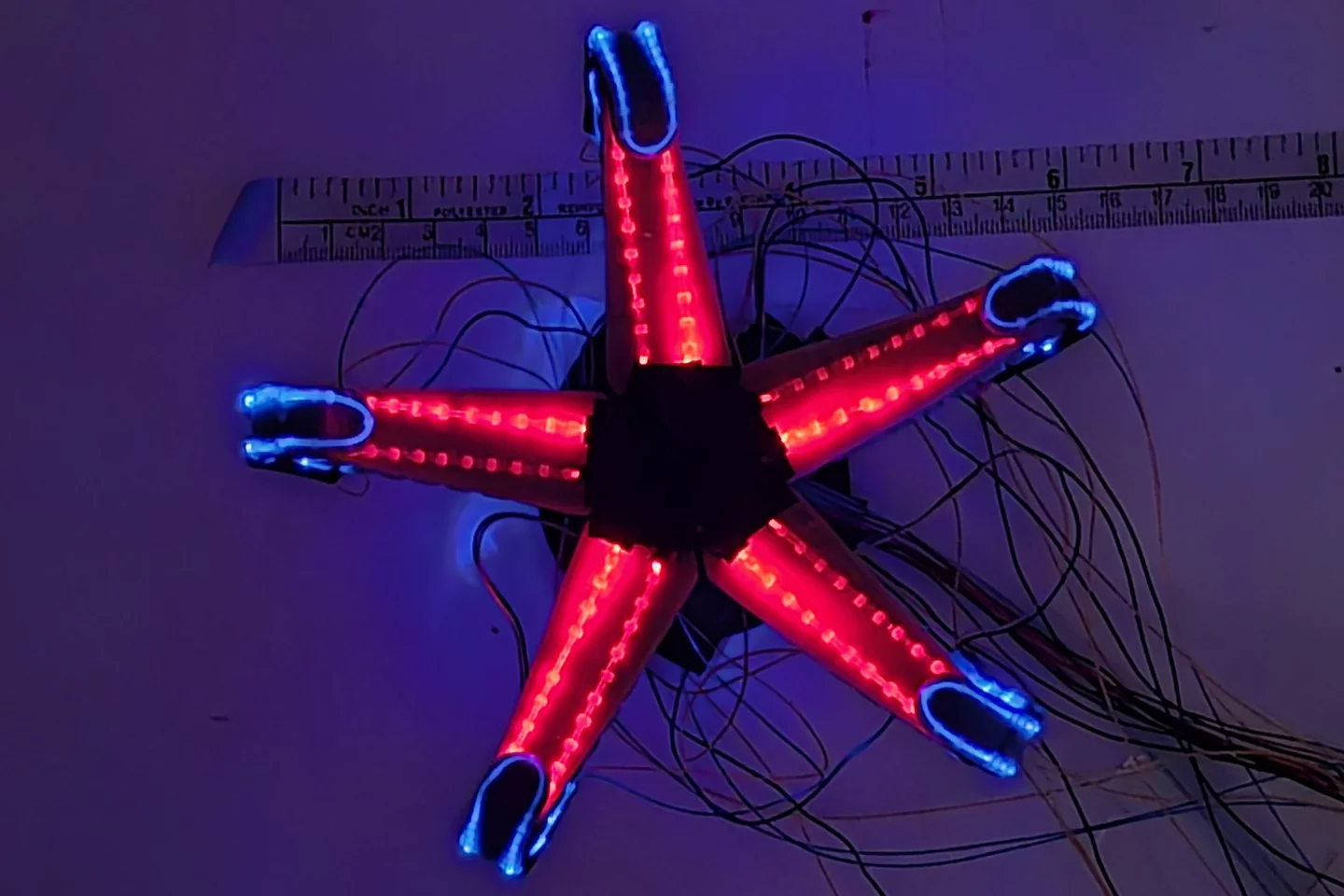
テスト段階では、ロボットハンドは高い認識精度と制御精度を実証し、センサーは掴んだ果物の形状をほぼ 100% の精度で予測できました。今回の試作機は重量65グラム未満、1回の開閉にかかる時間は2秒未満、最大約1キログラムの物体を持ち上げることができ、実際の農業機械に組み込むための軽量化と応答速度の基本条件を備えている。
プロジェクトリーダーで機械・材料・航空宇宙工学科助教授のアナンド・ミシュラ氏は、チームは今後2~4年以内にこのソフトウェア把握技術を世界市場に投入する計画であり、現場での大規模導入のニーズを満たすため、より拡張性の高い把握装置の開発に取り組んでいると述べた。研究者らはまた、宇宙ミッションでの奇妙な物体の掴み、水中環境探査、医療分野での脆弱な組織や臓器の安全な操作など、より幅広いシナリオでのこの技術の応用の可能性について楽観視している。

関連する研究論文がジャーナル「Nature Communications」に掲載されており、ソフトウェア構造、光ファイバーセンシング、ビジョンシステムを組み合わせたロボット把握ソリューションが、高損失、高精度のシナリオにとって重要な技術的手段になりつつあることを示しています。研究者らは、このようなソフトロボットが徐々に商業化に向けて進むにつれて、農場のピッキング最前線における人間のプレッシャーと果物や野菜の廃棄物の割合が大幅に改善され、精密農業とインテリジェント農業機械の開発に新たなツール基盤を提供することが期待されると指摘した。